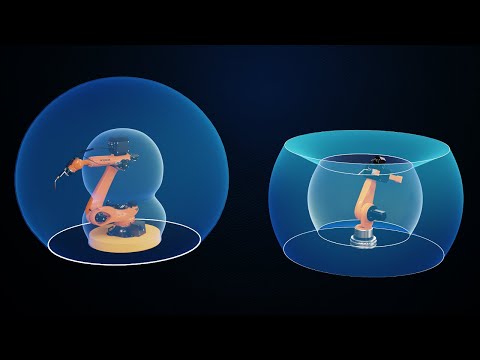
The work volume, or work envelope, is the three-dimensional space in which the robot can manipulate the end of its wrist (See Figure 6.3). Work volume is determined by the number and types of joints in the manipulator, the ranges of the various joints, and the physical size of the links.
Q. How do you find acceleration on a motion diagram?
Determining the acceleration from a motion diagram
Table of Contents
- Q. How do you find acceleration on a motion diagram?
- Q. How many coordinate system are there?
- Q. What are the main components of all robotic systems?
- Q. What is the name for information sent from robot sensors to robot controllers?
- Q. What are the four basic robot configurations available commercially?
- Q. Which one is the special type of robot configuration?
- Q. What are the major classification of robotics?
- Q. What are the classifications of robot?
- Q. How you can classify robots explain a classification of robot?
- select two successive velocity vectors,
- draw them starting from the same point,
- construct the vector (arrow) that connects the tip of the first velocity vector to the tip of the second velocity vector.
- The vector you have constructed represents the acceleration.
Q. How many coordinate system are there?
Three
Q. What are the main components of all robotic systems?
Basic Components of a Robot The components of a robot are the body/frame, control system, manipulators, and drivetrain.
Q. What is the name for information sent from robot sensors to robot controllers?
feedback
Q. What are the four basic robot configurations available commercially?
In terms of robotic movement capabilities, there are several common robotic configurations: vertically articulated, cartesian, SCARA, cylindrical, polar and delta.
- Vertically Articulated.
- Cartesian.
- SCARA (Selective Compliance Assembly Robot Arm)
- Cylindrical.
- Polar.
Q. Which one is the special type of robot configuration?
SCARA Robot • SCARA is a special type of jointed arm configuration. It stands for Selective Compliance Automated Robot Arm (or) Selective Compliance Articulated Robot Arm.
Q. What are the major classification of robotics?
A simpler, more complete definition of robotic types can be narrowed down to five types: Cartesian, Cylindrical, SCARA, 6-Axis and Delta. Each industrial robot type has specific elements that make them best-suited for different applications. The main differentiators among them are their speed, size and workspace.
Q. What are the classifications of robot?
There are six main types of industrial robots: cartesian, SCARA, cylindrical, delta, polar and vertically articulated. However, there are several additional types of robot configurations. Each of these types offers a different joint configuration.
Q. How you can classify robots explain a classification of robot?
On the basis of work envelope geometry, robots can be classified as Cartesian, Cylindrical, Spherical, Articulated, SCARA, and Delta. It is the most commonly used robot type in the industries. The linear movement of cartesian elements gives the robot a rectangular or cube shaped workspace.